
El control de tracción, se comenzó a aplicar a los autos comerciales en la década de los 80s, específicamente en el año 1986, su creador fue la casa Alemana Bosch; fue implementado en los coches de uso cotidiano para prevenir las pérdidas de adherencia de las llantas y así evitar que las mismas se patinen cuando el conductor se pasa en la aceleración o cuando la superficie sea muy deslizante.
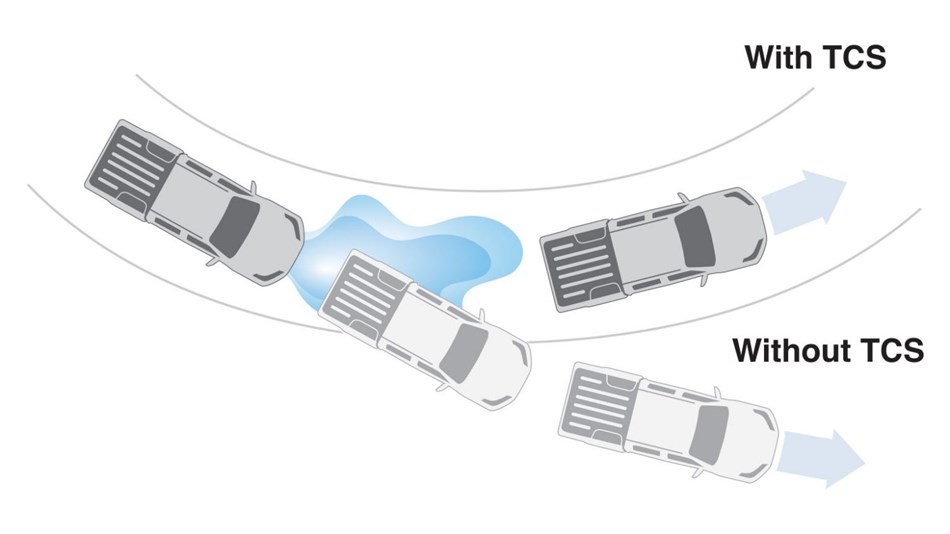
Los sistemas de controles de tracción, son denominados de diferentes formas dependiendo del fabricante, las más comunes son TCS o ASR. Su principal función es evitar la pérdida de adherencia en las ruedas en motrices del coche, dependiendo si el mismo es tracción delantera FWD, tracción trasera RWD o tracción en las cuatro ruedas AWD; en situaciones como el inicio de marcha o curvas que tengan un radio muy cerrado, en las que aplicar mal la potencia signifiquen un deslizamiento de las llantas y por lo tanto una pérdida de control.
Su historia
El inicio de los controles de tracción se remonta a la época de los ferrocarriles. Para ese momento las ruedas de acero montadas sobre los rieles del mismo material no brindaban un alto nivel de adherencia, y en conjunto con la alta potencia de las locomotoras, hacían que fácilmente patinaran las ruedas. En los primeros sistemas, al acelerar estas enormes máquinas de manera súbita y perder tracción, accionaban una alarma para que el maquinista pusiera en marcha el arenero, un dispositivo que dejaba caer desde un deposito un poco de arena por delante de las ruedas donde se aplicaba la potencia. Al caer la arena sobre la vía, se aumentaba la fricción y por lo tanto la adherencia.

Clases de controles de tracción
Hoy en día en los coches de uso cotidiano, nos encontramos con dos tipos de sistemas de controles de tracción: uno de ellos actúa sencillamente disminuyendo la potencia del motor, cuando el mismo detecta que la llanta no la potencia al asfalto completamente; el otro sistema es el que además de hacer lo que el anterior, también intervienen en el sistema de freno, logrando ralentizar la rueda que pierde la adherencia.
Los dos tipos funcionan directamente con el sistema de frenado ABS, ya que este es el encargado de comunicarse con el ordenador que gestiona el motor. Es decir que mediante los sensores del ABS, ubicados en cada rueda, el motor detecta si se está enviando un exceso de potencia y por lo tanto, si las mismas se encuentran en una situación de pérdida de agarre.
Los tipos de control en los que únicamente mediante el motor se corta la entrega de potencia, que va dirigida a las ruedas para reducir el deslizamiento, no son tan eficaces, ya que es muy probable que no podamos sortear una situación quizás sencilla, como por ejemplo, el pasar una rueda por una superficie mojada que se encuentre pintada, como los pasos de cebra. Al perder adherencia un solo neumático, el control de tracción cortara de igual forma el acelerador, de manera que nos quedaremos parados. Para estas situaciones en las que el patinaje es solo de una rueda, los sistemas que controlan el frenado, son más eficaces y funcionan de forma muy parecida al diferencial autoblocante, sacándonos rápidamente del apuro.
Los profesionales al volante más puristas, suelen criticar estos sistemas, ya que parten del hecho, de que limitan la conducción frenando las ruedas y disminuyendo la potencia del motor. Un conductor experimentado sabe trabajar con el acelerador en conjunto con el embrague, para poder salir de estas situaciones donde hay perdida de tracción; he aquí el significado del implemento de este control, dándole facilidad de manejo a las personas menos experimentadas, y reduciendo el número de accidentes por estas causas imprevistas sobre la carretera.
Funcionamiento en detalle
El funcionamiento de estos controles, parten de los sensores de giro de las ruedas, que se encuentran en el sistema ABS, en conjunto con el sensor de posición del acelerador. Primeramente los sensores de las ruedas van a detectar, que neumático gira más rápido que los otros y el sensor del acelerador va a indicarle al ordenador o unidad de mando, si esta pérdida de tracción se debe a un exceso de aceleración.
Al momento de detectarse la perdida de tracción de una de las cubiertas, los sistemas mixtos que funcionan con el frenado, reducirán primeramente la velocidad de la rueda en apuros frenándola, aplicando el efecto de diferencial autoblocante. Si con esta acción no se logra corregir la situación, automáticamente se activa la fase de corte de inyección y por lo tanto la disminución de la potencia a las ruedas, si el conductor siga aplicando el pedal del acelerador.

Control de tracción y la conducción sobre nieve
Para la situación en la que nos encontremos en un pavimento altamente deslizante, como lo es el cubierto por la nieve, el control de tracción deja de ser un asistente, para convertirse en un problema. Al patinar constantemente las ruedas, el coche pensara que se encuentra en una situación extrema y nos dejara sin la posibilidad de acelerar. Es por ello que en estos casos se debe desactivar el mismo, utilizando el interruptor o colocándolo en la velocidad que automáticamente lo desactiva, en caso de ser un coche más viejo; esto para lograr patinar las ruedas y así conseguir el agarre necesario bien sea llegando al asfalto excavando la nieve con los neumáticos, o solo haciéndolas patinar para ir avanzando sobre ella.
Gracias a la evolución de la industria automotriz, podemos encontrar hoy en día en nuestros coches de uso diario, tecnologías como esta, que proporcionan ayuda para conductores en situaciones que no todos van a saber controlar, reduciendo así el número de accidentes. Siendo esto el objetivo primordial de todas las marcas en materia de seguridad vial.
Artículos recomendados